1. Introduction
Underwater Robot Convention in JAMSTEC 2018 was held at JAMSTEC (Japan Agency for Marine-Earth Science and Technology) on 25-26th August 2018. The event has been held annually since 2007, and there are three classes: AUV, Free, and Junior. AUV Class was not held in this year because it was held at the underwater robot competition in OCEANS’18 / Techno-Ocean 2018 Kobe (OTO’18).
This report provides an overview of the event including the regulations, trends of robots, and results from the viewpoint of education.
2. Free Class
In the free class, teams compete for the originality of their robot. The free class has two roles. One is acceptance of ideas that cannot be evaluated by the AUV class, and the other is a ‘next goal’ for teams participated in the junior class described later. So, there are not strict limitations on the robots and many unique robots have been created by various teams up to now.
Evaluation of the teams is based on the total of weight points, presentation points, and competition points:
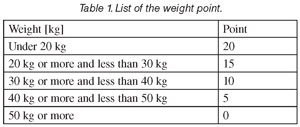
(1) Weight Points 20 pt.
(2) Presentation Points 40 pt.
(3) Competition Points 40 pt.
For a combined total score of 100 points.
(1) Weight Points
The score is determined by a dry weight of the robot as shown in Table 1.
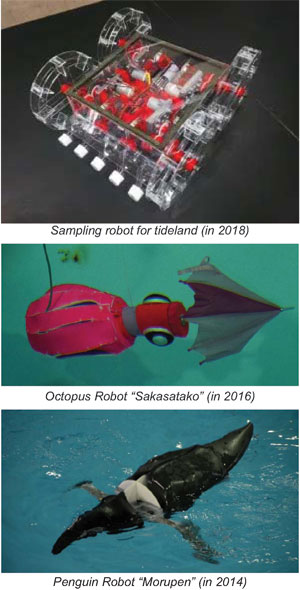 |
| Figure 1. Robots that entered the free class. |
(2) Presentation Points
The teams are requested to explain about their robot by a handout (A4 1 page) and 5 minutes presentation and discussions. Presentation points are given based on the quality of the presentation, handout, technical details, and originalities.
(3) Competition Points
The competition points are scored by a 5 minute demonstration at the pool. There are two chances of demonstration for each team. Evaluation focuses on the quality of performance, technological level, and ideas.
In 2018, the sampling robot for tideland (by “Tidal Robot Production Team” from Tokyo Institute of Technology 12th Phase Machinery Department) won first prize. It is designed to run about 4 hours and get a mud sample, measure location and temperature of the tideland. High school students have made this robot and operated it. (Fig.1)
There have been a lot of unique robots in previous years, including a penguin robot, an anomalocaris robot, an archerfish robot, and a robot that supplies drinking water to divers (see Fig. 1). In 2016, Octopus shaped ROV called Sakasatako” (by Oyama College of Technology “Sakasatako” Development Team) won first prize. The name of the robot comes from a homophony of “Sakasa” as an upside down and “Kasa” as an umbrella in Japanese. “Tako” means an octopus in Japanese. Actually, the robot has an umbrella. This robot moves by closing the umbrella.
In past years, there used to be many robots that could not move at all in the water. However, owing to recent development of ready-made products such as a brushless motor, waterproof RC servo, waterproof box, motor part of a fuel pump, increasing number of teams can build more reliable robots and various ideas come true, reaching Cambrian.
3. Junior Class
3.1 Educational Target and Schedule
The junior class is for junior high, high school and technical college students. In other words, this class is for young people who are aged 13 to 20 years old. This class aims to make the above people interested in the ocean/ocean engineering and to provide STEM (Science, Technology, Engineering, and Mathematics) learning. Considering the learning contents of junior high schools and senior high schools, the static balance of forces was selected as the main learning target. There are three forces on an underwater robot: buoyancy, gravity, and thrust.
The schedule is shown in Fig.2. Each team receives the specially designed ROV kit for free beforehand. They assemble and customize the ROV for a month before the competition. While building the kit, they can ask us questions via the website (http://edurov-mark3.com/). All the parts and design data used for the ROV are also available on the website.
 |
| Figure 2. Schedule of the junior class. |
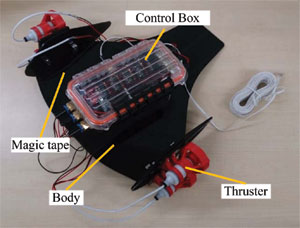 |
| Figure 3. Educational ROV “Mark3”. |
 |
3.2 Educational ROV
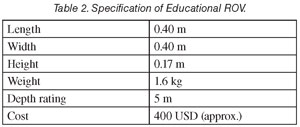
Educational ROV, an ROV specially designed for education by us, is shown in Fig 3. The flat plate part is the body. Buoyancy materials, thrusters, a control box, cameras, etc. can be fixed in arbitrary position of the body using a magic tape. Weight and size of the ROV is designed to make it easy for students to handle it. Table 2 shows the specifications of the ROV. Because the body and the control box is flat, building is easier than cylindrical parts. In addition, by using the magic tape for fixing parts, it is possible to arrange parts at an arbitrary position and orientation like a block toy, and it has a structure that can be easily adjusted/customized. It is possible for the users to understand the sense of balancing forces through trial and error based on statically thinking.
3.3 Competition Rules
In order to increase educational effect, it is desirable that teams achieve learning goal in a competitive way. We have tested the speedrun type competition at a maze in the past. In this year, although the speedrun type competition seems to be effective, we designed a more competitive game to increase educational effects.
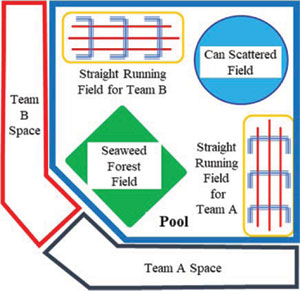
Fig. 4 shows the competition field. The field consists of the three elements of the straight running field, the can scattered field, and the seaweed forest field. The wide variety of the tasks prevent the teams from optimizing their robots in a uniform way. Although optimization to a single goal makes it easier to evaluate the result, it makes it difficult for the teams to learn by self-effort. Furthermore, the skill of the operator will have more weight than the quality of customization, in such situations.
The teams operate the ROV and compete the number of cans they have collected in 5minutes. The cans are placed at the two fields: can scattered field and seaweed forest field. The seaweed forest field is more challenging, and it has higher points for collecting the cans.
• Straight Running Field
Three gates, consisting of two poles, are arranged in a line. Teams can get points by going through each gate. The aim of this field is to evaluate the straight running stability of the robot, which is one of the most fundamental and important characteristics of underwater robots.
• Can Scattered Field
The cans are widely placed at the field. The number of the cans is the same as the seaweed forest field, but their density is half. As the field is far from the start position, and cans are widely distributed, speed of the ROV is more important than controllability, to collect cans at this field.
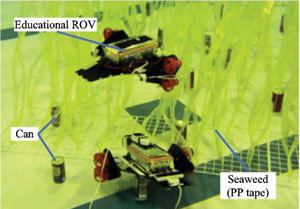
• Seaweed Forest Field
The field has seaweed like structures made by PP tape and a metal net. PP tape has positive buoyancy and stands upright as shown in Fig.5. It resists when the robot intrudes. By adjusting the density of seaweed, the robot can only approach from the horizontal direction. Compared with the can scattered field, more control accuracy is required. The score for the cans collected at this field is twice as high as it at the can scattered field.
 |
 |
| Figure 4. Competition field of the junior class. |
Figure 5. Overview of seaweed forest field. |
3.4 Results
The competition took place in three days. In 2018, there were 14 teams from all around Japan, consisting of 4 junior high schools, 8 senior high schools, and 2 technical college. The number of participation teams increased about twice as compared with last year.
The first day was spent for customizing their robots. We helped the teams but avoided showing a direct solution. Instead, we told the teams about FBD (Free Body Diagram) so that they can voluntarily understand the importance of the force balance.
 |
| Figure 6. Examples of the robots in junior class. |
 |
| Figure 7. Overview of the exhibition match. |
In the second day, we provided a review on the rules and schedule explained in the forum beforehand and made safety education. After that, the teams customized their robots like the first day. Some teams developed tools not to be mounted on their robots, but to support operations such as underwater glasses to check the position of the ROV.
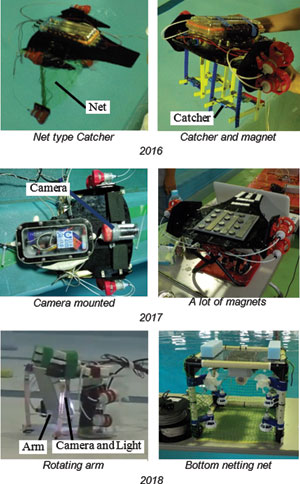
The tournament was held in the third day. As a result, all the teams succeeded in going through all the gates. Many teams challenged the seaweed forest field, and only one team succeeded in collecting cans there. Keio A team (by Keio Shonan Fujisawa Junior & Senior High School) won first prize this year (in 2018 at left, Fig. 6).
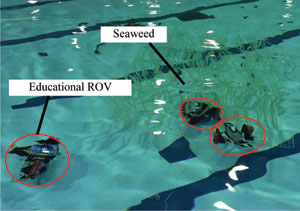
As an exhibition match after all games, we held a game with all the teams without the restrict rules (Fig. 7). By announcing about the exhibition in advance, teams lost in an early stage further customized their robots. All the teams succeeded in scoring at the exhibition match.
We conducted a questionnaire to the teams after the event and confirmed that they are satisfied with the competition and the difficulty level of the kit. For example, the difficulty of the kit was evaluated as hard as 2.4/5 on average. The number of people who answered “difficult” has increased from last year. On the other hand, the enjoyment of the tournament is 4.3/5 on average. It can be said that participants enjoyed the competition. From the answers of these questions, it seems that the participants enjoyed the difficult tasks.
3.5 Trends of the Teams
In this section, we discuss about participating teams’ understanding of statics and technical aspects from the trend about how the teams customized their ROVs in recent three years. There are three teams participated every year. They improved technical level through continuous participation. For example, cameras were adopted by 35% of the teams in 2018, which only 1 team adopted in 2017. Therefore, the teams who participated in 2018 seem to have studied the ROVs developed in 2017 and 2016.
In 2018, a team attached a rotating arm to their robot as shown in 2016 at left, Fig.6. This ROV ran at the bottom of the pool and collected cans by the arm. In order to realize this behavior, the team adjusted the buoyancy of the ROV. The team seems to have understood that the relationship between buoyancy and center of gravity is important. It seems that this customization was made based on the experience in last years shared among the teams.
In early years, there were some customization that lacked consideration of statics, such as attaching a large net as shown in Fig. 6 (in 2016 at left). However, we observed the teams explaining the reasons for the failure, presenting a new customization plan, and observing its results. For example, the robot in Fig 6 (in 2016 at left) can catch a can at near the center of gravity of the robot using the catcher with a magnet. Furthermore, this customization does not degrade mobility of the robot so much.
As only steel cans were used in 2016, catchers using magnets were mainly used. Since 2017, aluminum cans have also been placed. This made some teams to develop robots with a net and robots with combination of net and magnets. Also, bonus points by shooting crab models placed on the floor of the pool contributed to the appearance of a robot with cameras as shown in Fig. 6 (2017 at left and 2018).
4. Conclusions
Underwater Robot Convention in JAMSTEC 2018 ended successfully. Teams increased in these three years. Through the recent three years, diversity of the robots in the free class has been increased, owing to the improvements of ready-made products. Also, in the junior class, the quality of the robots has been gradually improved, and there is a team that graduated from junior and participated in the free class. We are very glad about that.
We will continue to help people leaning through the experience on underwater robotics.
Acknowledgments
The Underwater Robot Convention in JAMSTEC in 2018 was supported by the IEEE/OES Japan Chapter, MTS Japan Section, Techno-ocean network, JAMSTEC, The Japan Society of Naval Architects and Ocean Engineers, and NPO Japan Underwater Robot Network. We would like to express our sincere appreciation to the sponsors for their strong support and cooperation in realizing this competition.
 |
| Group photo of junior class in 2018. |
|